


- Mesajlar
- 922
Merhaba.
Proje yapıyorum.
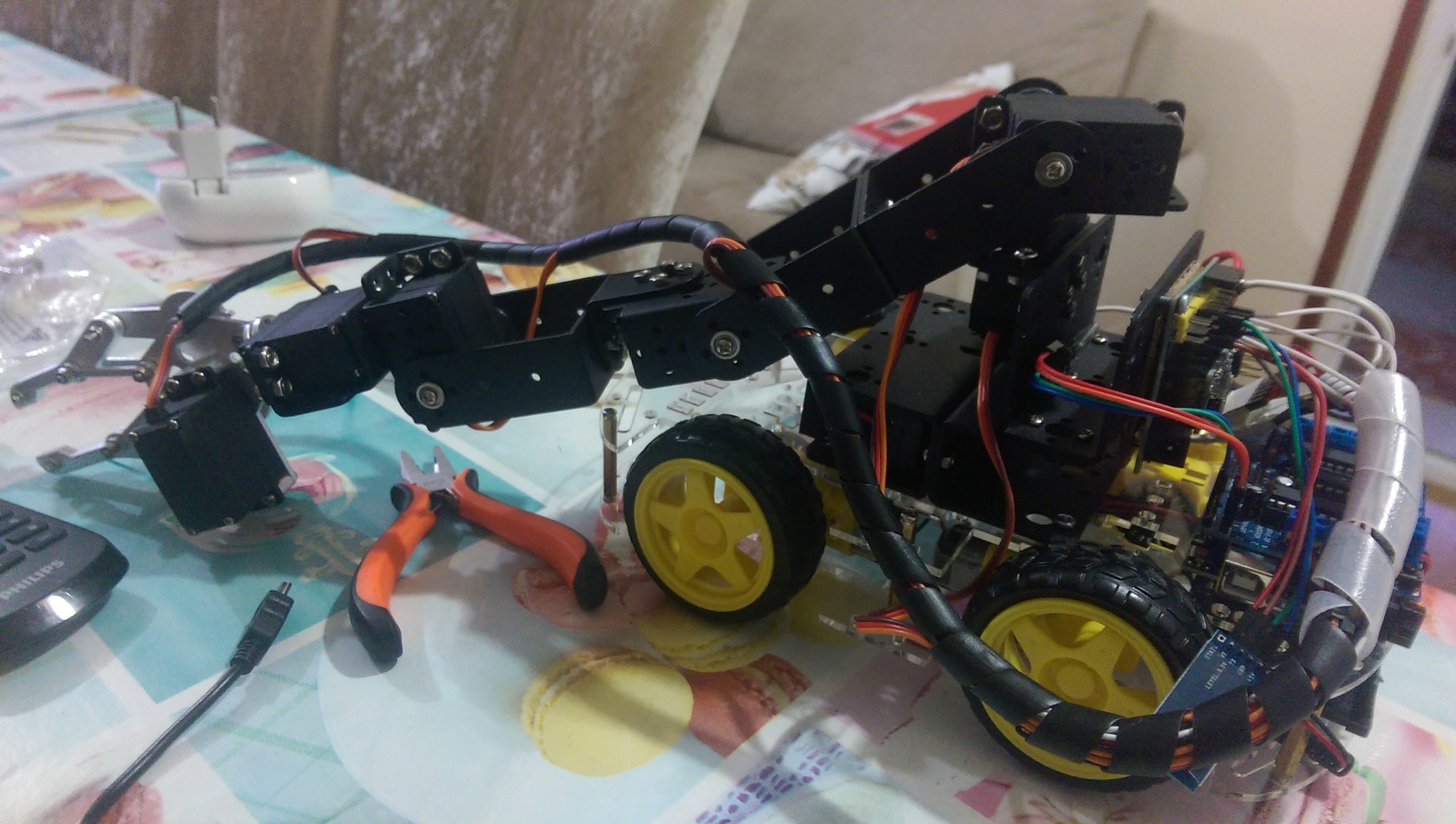
yukarıdaki robot kolda 6 adet mg996r servo motor var
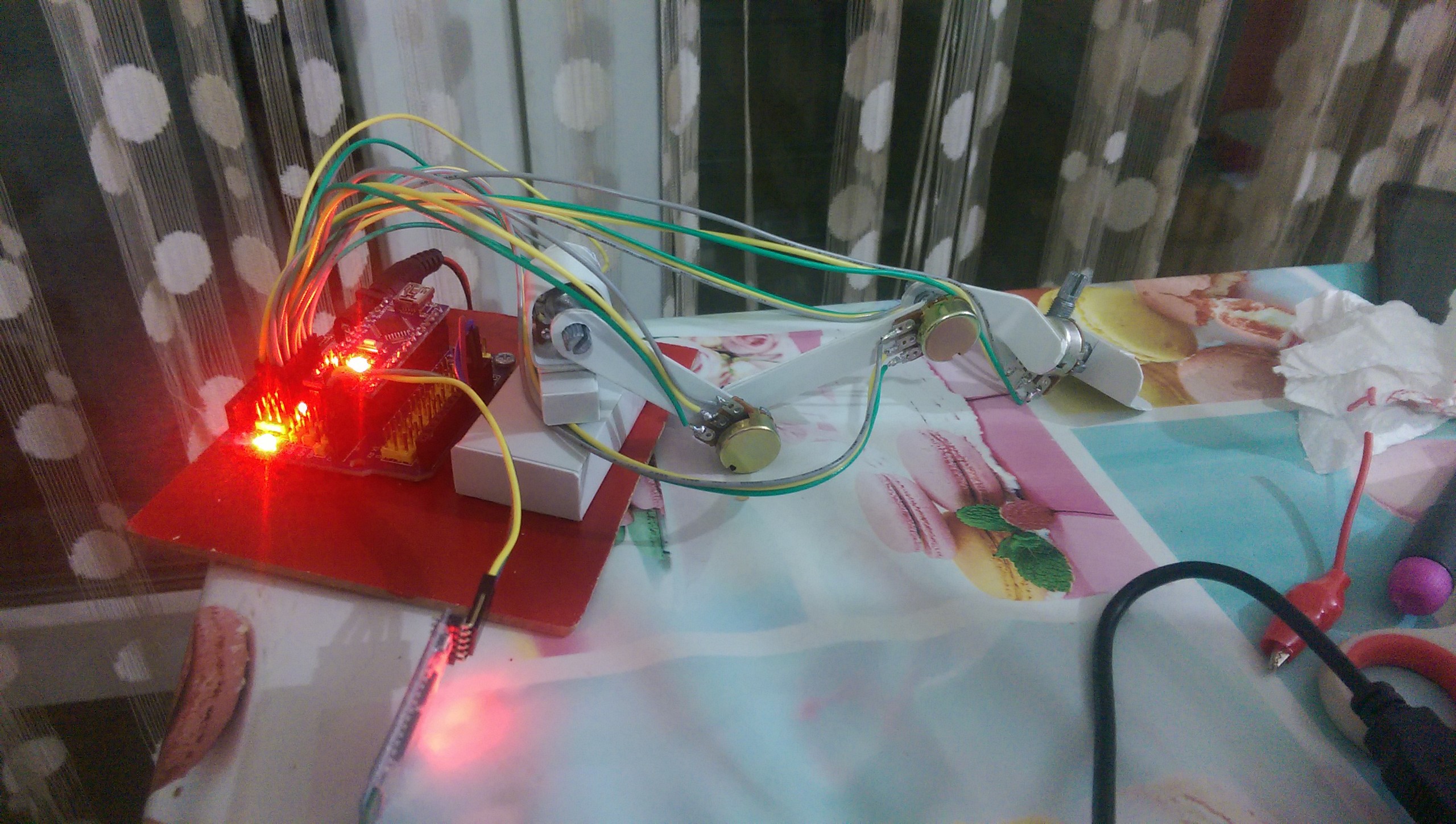
Aşağıdaki yapay potansiyometreli robot kol ile bluetooth üzerinden kontrol etmek istiyorum
herşey iyi güzel sıkıntı yok fakat
açı değerleri bluetoothdan geliyor benim tek sorunum Servo motor açı değerine geliyor fakat delirircesine titriyor. titreme gürültü şeklinde değilde açısal değerde oluyor yaklaşık 60 derecelik titremeler oluyor gidiyor hızlı bir şekilde geri geliyor.
seri portta bluetoothdan gelen değere bakıyorum sıkıntı yok parazit yok gelen değer normal ama Servo motor açısal titreme yaşıyor.
Dışarıdan besleme yapıyorum 3.7 3000mah 2 adet lipo pil ile seri bağlantı ile besliyorum yani 7.4 volt oluyor işin uzmanı arkadaşlardan yardım istiyorum yardım etmek isteyen arkadaşlara telefonla da görüşebilirim. Şimdiden teşekkürler.
birde az önce denedim tüm servolar çalıştığı zaman lipo pillerin kablolaru duman atıyor patlamasın diye çıkardım") )
)
bu iki sorundan anlayan uzman arkadaşlar varsa telefon ile de görüşebiliriz hızlı çözüm için
Proje yapıyorum.
yukarıdaki robot kolda 6 adet mg996r servo motor var
Aşağıdaki yapay potansiyometreli robot kol ile bluetooth üzerinden kontrol etmek istiyorum
herşey iyi güzel sıkıntı yok fakat
açı değerleri bluetoothdan geliyor benim tek sorunum Servo motor açı değerine geliyor fakat delirircesine titriyor. titreme gürültü şeklinde değilde açısal değerde oluyor yaklaşık 60 derecelik titremeler oluyor gidiyor hızlı bir şekilde geri geliyor.
seri portta bluetoothdan gelen değere bakıyorum sıkıntı yok parazit yok gelen değer normal ama Servo motor açısal titreme yaşıyor.
Dışarıdan besleme yapıyorum 3.7 3000mah 2 adet lipo pil ile seri bağlantı ile besliyorum yani 7.4 volt oluyor işin uzmanı arkadaşlardan yardım istiyorum yardım etmek isteyen arkadaşlara telefonla da görüşebilirim. Şimdiden teşekkürler.
birde az önce denedim tüm servolar çalıştığı zaman lipo pillerin kablolaru duman atıyor patlamasın diye çıkardım
)bu iki sorundan anlayan uzman arkadaşlar varsa telefon ile de görüşebiliriz hızlı çözüm için